
안녕하세요? 이번 글은 OpenCV를 사용한 카메라 캘리브레이션(Camera Calibration)에 관해 정리해 보겠습니다. 이 내용은 LearnOpenCV 운영자 Satya Mallick(사티야 말릭) 님의 글을 일부 번역, 보완한 것입니다.
Camera Calibration using OpenCV
A step by step tutorial for calibrating a camera using OpenCV with code shared in C++ and Python. You will also understand the significance of various steps.
learnopencv.com
카메라는 시각 센서로 사용될 때 로봇, 감시, 우주 탐사, 소셜 미디어, 산업 자동화 및 엔터테인먼트 산업과 같은 여러 영역의 필수적인 부분입니다. 많은 응용 분야에서 카메라를 시각적 센서로 효과적으로 사용하려면, 카메라의 파라미터(parameters)를 아는 것이 필수적입니다. 이 글에서는 카메라 캘리브레이션과 관련된 단계와 그 중요성을 이해하게 될 것입니다.
카메라 캘리브레이션(camera calibration)이란 무엇인가?
카메라의 파라미터(parameters)를 추정하는 과정을 카메라 캘리브레이션이라고 합니다.
실세계의 3D 점과 캘리브레이션된 카메라로 캡처한 이미지의 해당 2D 투영(픽셀)간의 정확한 관계를 결정하는데 필요한, 카메라에 대한 모든 정보(파라미터 또는 계수)를 의미합니다.
일반적으로 이것은 두 종류의 파라미터를 복구하는 것을 의미합니다.
1. 카메라/렌즈 시스템의 내부 파라미터(Internal parameters). 예: 초점 거리(focal length), 광학 중심(optical center), 렌즈의 방사 왜곡 계수(radial distortion coefficients of the lens).
2. 외부 파라미터(External parameters): 이것은 일부 세계 좌표계에 대한 카메라의 방향(회전 및 이동, Rotation and translation)을 나타냅니다.
아래 이미지에서, 기하학적 캘리브레이션(geometric calibration)을 사용하여 추정된 렌즈의 파라미터는 이미지 왜곡을 제거하는데 사용되었습니다.
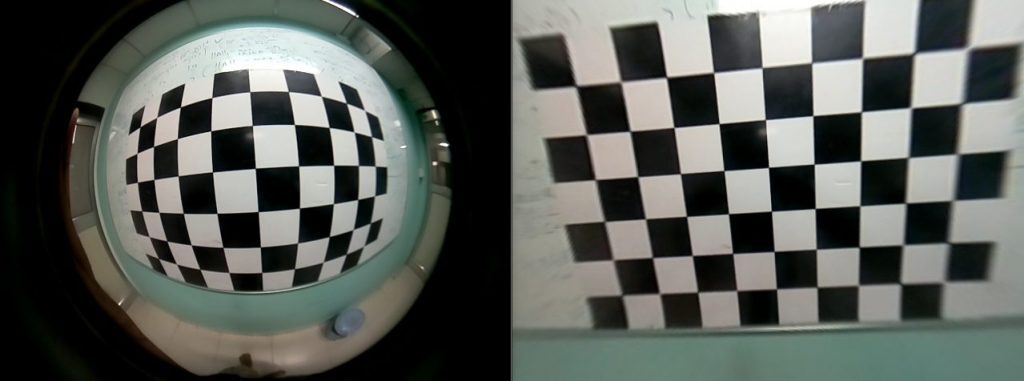
그림 왜곡된 이미지에 대한 기하학적 캘리브레이션 효과.
OpenCV를 사용한 카메라 캘리브레이션(Camera Calibration)
캘리브레이션 과정을 이해하려면 먼저 이미지 형성의 기하학(Geometry of Image Formation)을 이해해야 합니다. 이미지 평면에 대한 3D 점의 투영을 찾으려면 먼저 외부 파라미터(extrinsic parameters: Rotation R과 translation t)를 사용하여 점을 세계 좌표계에서 카메라 좌표계로 변환해야 합니다.
다음으로 카메라의 내부 파라미터(intrinsic parameters)를 사용하여 점을 이미지 평면에 투영합니다. 세계 좌표의 3D 점(X_w, Y_w, Z_w)와 이미지 좌표의 투영(u, v)을 연결하는 방정식은 다음과 같습니다.

여기서, P는 두 부분으로 이루어진 3×4 투영 행렬(projection matrix)입니다: 내부 파라미터를 포함하는 내부 행렬(intrinsic matrix) (K)와 3x3 회전 행렬과 3x1 변환 벡터의 조합인 외부 행렬(extrinsic matrix) [R | t].

내부 행렬 K는 상삼각행렬(upper triangular matrix)입니다.
f_x, f_y는 x와 y 초점 거리(focal length)입니다(일반적으로 f_x=f_y). c_x, c_y는 이미지 평면에서 광학 중심의 x와 y 좌표로써 이미지의 중심을 사용하면 일반적으로 충분히 근사합니다. γ(gamma)는 축 사이의 기울기로 일반적으로 0입니다.
카메라 캘리브레이션의 목표
캘리브레이션 프로세스의 목표는 알려진 3D 점 (X_w, Y_w, Z_w)와 해당 이미지 좌표 (u, v) 세트를 사용하여 3×3 행렬 K, 3×3 회전 행렬 R, 3×1 이동 벡터 t를 찾는 것입니다. 내부와 외부 매개변수의 값을 얻을 때 카메라가 캘리브레이션되었다고 합니다.
요약하면, 카메라 캘리브레이션 알고리즘에는 다음과 같은 입력과 출력이 있습니다.
1. 입력 : 2D 이미지 좌표와 3D 세계 좌표가 알려진 점들을 포함하는 이미지 모음.
2. 출력 : 3×3 카메라 내부 행렬, 각 이미지의 회전 및 이동.
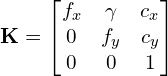
OpenCV에서 카메라 내부 행렬에는 기울기 파라미터가 없습니다. 따라서 행렬은 다음과 같은 형식입니다.

다양한 유형의 카메라 캘리브레이션 방법
다음은 주요 유형의 카메라 캘리브레이션 방법입니다:
1. Calibration pattern(캘리브레이션 패턴): 이미징 프로세스를 완전히 제어할 수 있는 경우, 캘리브레이션을 수행하는 가장 좋은 방법은 여러 관점에서 객체 또는 알려진 차원 패턴의 여러 이미지를 캡처하는 것입니다. 체커보드(checkerboard) 기반 방식은 이 카테고리에 속합니다. 체커보드 패턴 대신에 알려진 차원의 원형(circular) 해턴을 사용할 수도 있습니다.
2. Geometric clues(기하학적 단서): 때때로 캘리브레이션에 사용할 수 있는 직선(straight lines) 및 소실점(vanishing points)과 같은 다른 기하학적 단서가 장면(scene)에 있습니다.
3. Deep Learning based(딥 러닝 기반): 이미징 설정을 거의 제어할 수 없는 경우(예: 장면의 단일 이미지가 있는 경우) 딥러닝 기반 방법을 사용하여 카메라의 캘리브레이션 정보를 얻는 것이 여전히 가능할 수 있습니다.
단계별 카메라 캘리브레이션
캘리브레이션 프로세스는 아래에 주어진 순서도에 의해 설명됩니다.
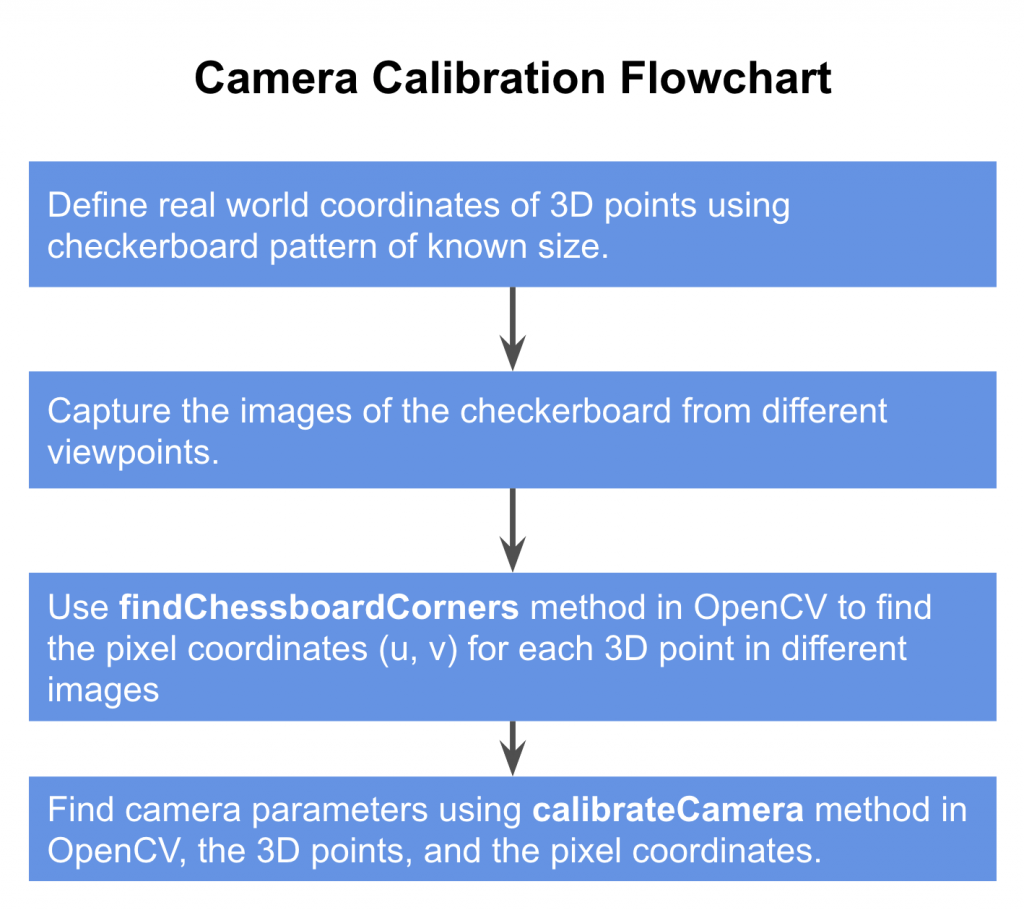
이 단계를 살펴보겠습니다.
1단계: 체커보드 패턴으로 실세계 좌표 정의

세계 좌표계(World Coordinate System): 우리의 세계 좌표는 방의 벽에 부착된 이 체커보드 패턴으로 고정됩니다. 3D점은 체커보드에 있는 사각형의 코너입니다. 위 보드의 모든 코너는 세계 좌표계의 원점으로 선택할 수 있습니다. X_w와 Y_w 축은 벽을 따라 있으며, Z_w축은 벽에 수직입니다. 따라서 체커보드의 모든 점은 XY 평면에 있습니다(즉, Z_w = 0 ).
캘리브레이션 과정에서, 우리는 알고 있는 3D 점(X_w, Y_w, Z_w)과 해당 픽셀 위치 (u, v) 이미지 세트로 카메라 파라미터를 계산합니다.
3D 점의 경우 다양한 방향에서 알려진 차원의 체커보드 패턴을 촬영합니다. 세계 좌표는 체커보드에 붙어있고 모든 꼭짓점이 평면 위에 있기 때문에, 우리는 모든 점이 0이 되도록 Z_w를 임의로 선택할 수 있습니다. 점들은 체커보드에서 균등하게 간격을 두고 있기 때문에, 각 3D 점의 (X_w, Y_w) 좌표는 한 점을 기준점(0, 0), 그 기준점을 기준으로 나머지를 정의함으로써 쉽게 정의할 수 있습니다.
캘리브레이션에서 체커보드 패턴이 널리 사용되는 이유는 무엇입니까?
체커보드 패턴은 이미지에서 뚜렷하고 쉽게 감지할 수 있습니다. 뿐만 아니라, 체커보드의 사각형 코너는 두 방향으로 급격한 기울기를 가지므로 위치 파악에 이상적입니다. 또한, 이러한 코너는 체커보드 선의 교차점에 있다는 사실과도 관련이 있습니다. 이러한 모든 사실은 체커보드 패턴에서 사각형의 코너를 견고하게 찾는데 사용됩니다.

감지된 체커보드 코너를 그린 후 결과
2단계: 다양한 시점에서 체커보드의 여러 이미지 캡처
다음으로, 체커보드를 정적으로 유지하고 카메라를 움직여 체커보드의 여러 이미지를 찍습니다. 또는 카메라를 일정하게 유지하고 다른 방향에서 체커보드 패턴을 촬영할 수도 있습니다. 두 상황은 수학적으로 유사합니다.

3단계 : 체커보드의 2D 좌표 찾기
이제 체커보드 이미지가 여러 장 있습니다. 우리는 또한 세계 좌표에서 체커보드에 있는 점의 3D 위치를 알고 있습니다. 마지막으로 필요한 것은 이미지에서 이러한 체커보드 코너의 2D 픽셀 위치입니다.
3.1 체커보드 코너 찾기
OpenCV는 체커보드를 찾고 코너 좌표를 반환하는 findChessboardCorners라는 내장 함수를 제공합니다.
retval, corners = cv2.findChessboardCorners(image, patternSize, flags)
| image | 소스 체커보드 사진. 8-bit 그레이스케일 또는 컬러 이미지 |
| patternSize | 체커보드 행과 열당 내부 코너 수 |
| corners | 감지된 코너의 출력 배열 |
| flags | 다양한 작업 플래그 |
패턴이 감지되었는지 여부에 따라 출력은 true 또는 false입니다.
3.2 체커보드 코너 개선
좋은 캘리브레이션은 정밀도(precision)에 관한 것입니다. 좋은 결과를 얻으려면 서브픽셀(sub-pixel) 수준의 정확도로 코너 위치를 얻는 것이 중요합니다.
OpenCV의 함수 cornerSubPix는 원본 이미지와 코너 위치를 가져와서 원래 위치의 작은 이웃 내에서 가장 좋은 코너 위치를 찾습니다. 알고리즘은 완전히 반복적이므로 종료 기준(예: 반복 횟수 및/또는 정확도)을 지정해야 합니다.
cv2.cornerSubPix(image, corners, winSize, zeroZone, criteria)| image | 입력 이미지 |
| corners | 입력 코너의 초기 좌표와 출력을 위해 제공되는 개선 좌표 |
| winSize | 검색 창의 측면 길이의 절반 |
| zeroZone | 아래 공식의 합산이 이루어지지 않은 탐색 영역 중앙에 있는 사각 영역(dead region) 크기의 절반. 자기상관 행렬(autocorrelation matrix)의 가능한 특이성을 피하기 위해 때때로 사용. (-1,-1) 값은 그러한 크기가 없음을 나타냄. |
| criteria | 코너 미세 조정(corner refinement)의 반복 프로세스 종료 기준. 즉, 코너 위치 미세 조정 프로세스는 criteria.maxCount 반복 후 또는 일부 반복에서 코너 위치가 criteria.epsilon보다 작게 이동할 때 중지됨. |
4단계: 카메라 캘리브레이션
캘리브레이션의 마지막 단계는 세계 좌표의 3D 점과 모든 이미지의 2D 위치를 OpenCV의 calibrateCamera방법으로 전달하는 것입니다. 구현은 Zhengyou Zhang의 논문을 기반으로 합니다.
calibrateCamera에 대한 구문을 살펴보겠습니다.
retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(objectPoints, imagePoints, imageSize)| objectPoints | 3D 점 벡터로 구성된 벡터. 외부 벡터는 패턴 사진의 수만큼 요소를 포함 |
| imagePoints | 2D 이미지 점 벡터로 구성된 벡터 |
| imageSize | 이미지의 크기 |
| cameraMatrix | 내부 카메라 행렬 |
| distCoeffs | 렌즈 왜곡 계수(Lens distortion coefficients) |
| rvecs | 회전은 3×1 벡터로 지정. 벡터의 방향은 회전 축을 지정하고 벡터의 크기는 회전 각을 지정 |
| tvecs | 3×1 이동 벡터 |
카메라 캘리브레이션 코드
import cv2
import numpy as np
import os
import glob
# 체커보드의 차원 정의
CHECKERBOARD = (6,9) # 체커보드 행과 열당 내부 코너 수
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 각 체커보드 이미지에 대한 3D 점 벡터를 저장할 벡터 생성
objpoints = []
# 각 체커보드 이미지에 대한 2D 점 벡터를 저장할 벡터 생성
imgpoints = []
# 3D 점의 세계 좌표 정의
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None
# 주어진 디렉터리에 저장된 개별 이미지의 경로 추출
images = glob.glob('./images/*.jpg')
for fname in images:
img = cv2.imread(fname)
# 그레이 스케일로 변환
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 체커보드 코너 찾기
# 이미지에서 원하는 개수의 코너가 발견되면 ret = true
ret, corners = cv2.findChessboardCorners(gray,
CHECKERBOARD,
cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)
# 원하는 개수의 코너가 감지되면,
# 픽셀 좌표 미세조정 -> 체커보드 이미지 표시
if ret == True:
objpoints.append(objp)
# 주어진 2D 점에 대한 픽셀 좌표 미세조정
corners2 = cv2.cornerSubPix(gray, corners, (11,11),(-1,-1), criteria)
imgpoints.append(corners2)
# 코너 그리기 및 표시
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
h,w = img.shape[:2] # 480, 640
# 알려진 3D 점(objpoints) 값과 감지된 코너의 해당 픽셀 좌표(imgpoints) 전달, 카메라 캘리브레이션 수행
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)print("Camera matrix : \n") # 내부 카메라 행렬
print(mtx)Camera matrix :
[[469.18043387 0. 259.40407955]
[ 0. 454.89333646 218.33055988]
[ 0. 0. 1. ]]print("dist : \n") # 렌즈 왜곡 계수(Lens distortion coefficients)
print(dist)dist :
[[ 0.15034446 -0.03940961 -0.0046684 -0.01587236 -0.1004698 ]]print("rvecs : \n") # 회전 벡터
print(rvecs)rvecs :
[array([[-0.21876227],
[-0.04970272],
[ 1.53439193]])]print("tvecs : \n") # 이동 벡터
print(tvecs)tvecs :
[array([[ 7.11219416],
[-2.02346387],
[12.79357913]])]